3D Haptic Simulation with Octree Collision Detection
Published:
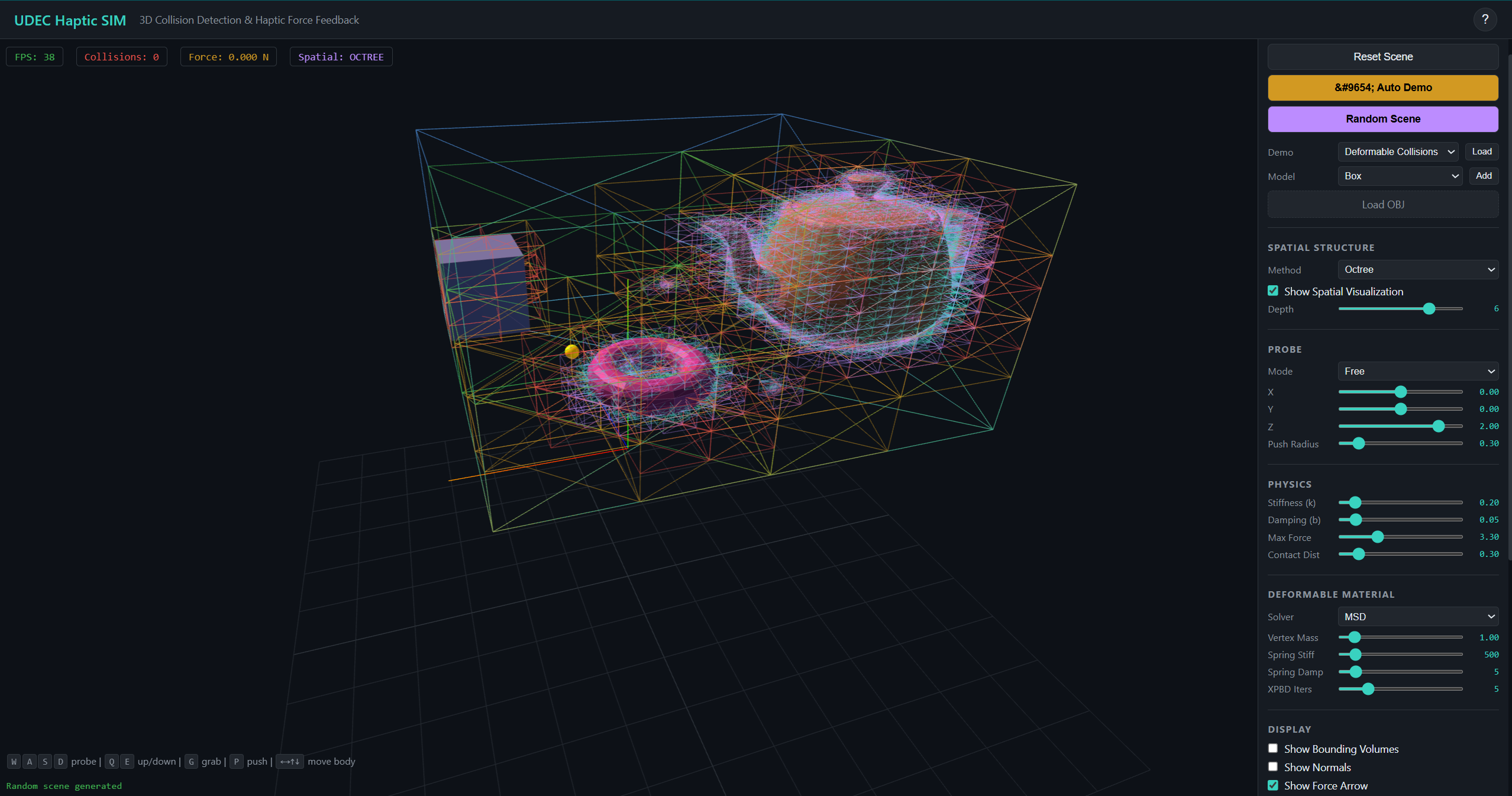
A web-based 3D simulation system that recreates the experience of haptic (touch-based) interaction with virtual objects. Originally developed in 2008 at Universidad de Concepcion using C++/CLI, OpenGL, and a physical PHANToM Omni haptic device, the modern version replaces hardware dependencies with browser-based mouse and slider interaction while preserving the core physics engine.
Collision detection
Spatial queries use an octree partitioning structure (max depth of 4) that recursively subdivides 3D space into eight axis-aligned octants, reducing broad-phase collision detection from O(N^2) to O(N log N). Child nodes are indexed by a 3-bit code: index = (x >= center_x) + 2(y >= center_y) + 4(z >= center_z). For narrow-phase resolution, the system applies the Separating Axis Theorem (SAT) for exact triangle-triangle intersection testing across 11 potential separating axes (2 face normals + 9 edge-edge cross products from 3 edges of each triangle). For each candidate axis, the 6 vertices are projected onto the axis; if the projection intervals [min_A, max_A] and [min_B, max_B] do not overlap on any axis, the triangles are separated. Each SAT test is O(1) – exactly 11 axis checks with 6 dot products each. This two-phase approach keeps the simulation responsive even with moderately complex meshes.
Force feedback model
Contact forces follow a spring-damper model based on Hooke’s law with viscous damping – a Kelvin-Voigt formulation (spring and dashpot in parallel): F = -k(p_probe - p_contact) - bv_probe, where k is the spring stiffness (N/m), p_contact is the nearest surface point (computed via Voronoi region classification with barycentric coordinates), b is the damping coefficient (Ns/m), and v_probe is the probe velocity. The force is clamped at F_max to match physical device limits. Stability requires k_max = 2*b/T (the Z-width constraint from Colgate & Brown, 1994), which is relaxed in the web version due to the lower update rate (~10 Hz vs. 1 kHz for physical haptic devices). Wavefront OBJ mesh loading with fan triangulation handles arbitrary geometry, and Three.js with WebGL provides the rendering layer.
Origin and context
This was my 2008 undergraduate thesis project at Universidad de Concepcion, part of a FONDEF-funded project aimed at building arthroscopic surgical training simulators. The haptic device work was also the technology exploration that directly led to the FeelIT project — a haptic interface for visually impaired people. The legacy C++/CLI code is preserved alongside the modern Python/FastAPI web application.

Live application
▶ Live demo — haptic.fasl-work.com — 3D haptic simulator — octree collision + spring-damper feedback.